131 1300 0010
在生產酸酐的小型控制現場中,需要對各反應釜的溫度和壓力進行實時的監測,并使它們保持在規定的誤差范圍內。由于需要控制的設備較多、相互距離又較遠,且現場有較強的工業干擾,因此采用體積小、抗干擾能力強的單片機作為上位機與現場控制器來組成分布式數據采集與控制系統。在該系統中,上位機與現場控制器之間采用通信網絡連接,各測控單元獨立工作,完成參數的測量與控制;而在主控室內,由主機對各現場測控器的工作狀態進行監測,向各分機發送控制命令以及對整個生產過程的數據進行統一的顯示、儲存等。在本系統中采用主從式RS-485串行通信標準。
1 單片機通信網絡
RS-485串行總線接口標準以差分平衡方式傳播信號,在發送端驅動器將TTL電平信號轉換成差分信號輸出,在接受端接收器將差分信號還原成TTL信號,這樣具有很強的抗共模干擾的能力,同時接收靈敏度也很高;在傳輸數據速度達100 kb/s時通信距離可達1200 m;允許一對雙絞線上一個發送器驅動多個負載設備,設備簡單、成本低和維護方便。因此,工業現場控制系統中一般都采用該總線標準進行數據傳輸。
在該通信系統中,在主機的控制下,通過軟件協議,主從機間可互相通信。并且在一個多機通信系統中,只有一臺單機作為主機,各臺從機間不能相互通信,即使有信息交換也必須通過主機轉發。各單片機間通過RS-485總線通信,主機通過點名方式給各從機發送命令,實現對系統的主控權。主機在執行任務的同時要對從機不斷地輪詢,從而監視從機的狀況、接收從機的請求或給從機發送命令。
通信系統總體結構如圖1所示。
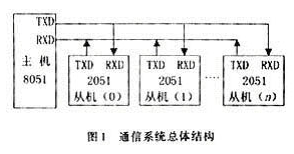
為了保證正常傳輸信號干凈、無毛刺,在總線末端接一個120 Ω的匹配電阻吸收總線上的反射信號。電纜使用雙芯屏蔽電纜,屏蔽端連接設備機殼。為了避免干擾,每個設備都應接地。
2 主控制器設計
主控制器通過串行通信接口實現對各現場控制器的直接控制,主要用于實現人-機對話功能。由于該系統實時性要求不是很高,為了減少線路板的面積和減少占用單片機的口線,選用體積小、管腳少、可以串行輸入/輸出的芯片。
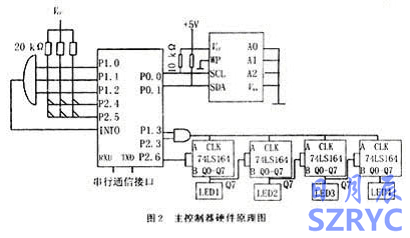
主機選用8051單片機。因為主機要完成數據儲存,并要求具有掉電保護的功能,所以8051需要擴展外存。串行EEPROM以其體積小、功耗低、價格低廉、高可靠性、連線簡單等顯著優勢,逐漸被用于多功能的對速度要求不太高的智能儀器儀表中。在本系統中,選用24系列的串行EEPROM 24C64。因P0口內部沒有上拉電阻,故作I/O口使用時外加10 kΩ的上拉電阻。
鍵盤采用中斷掃描工作方式。當有鍵按下時INT0為低電平,向CPU發中斷申請,進入鍵盤中斷服務程序進行按鍵識別及相應功能程序的執行。采用串行口靜態驅動方式,使用74LS164串行輸入、并行輸出8位移位寄存器作為段選碼驅動器,每個數碼管使用一片74LS164,把4片串聯起來,便構成一個4位的LED顯示器。
各串行件都用軟件編程實現時鐘及數據的傳遞。
主控制器的硬件電路如圖2所示。
3 現場控制器設計
每臺現場控制器是各自獨立的系統,接收(溫度或壓力)傳感器輸出的模擬信號,和工藝要求的參數相比較,從而得出該路信號修正量的大小。輸出的模擬信號作為電磁閥的輸入信號來控制流量(氣體或水蒸氣)的大小,從而達到對溫度或壓力的控制。圖3是它的硬件電路。
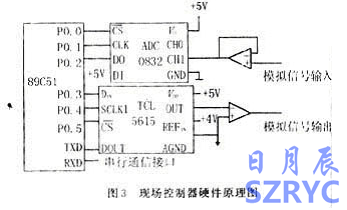
單片機選用20腳的AT89C2051。AT89C2051是美國ATMEL公司生產的一種高性能單片機,價格低廉、與Intel公司生產的MCS 51單片機高度兼容。AT89C2051將多功能8位CPU和2 kB閃爍存儲器集成在1塊芯片上,對輸出口進行了簡化,形成了一種僅有20個引腳的單片機,在功能上相當于Intel公司的8031最小應用系統。
具有串行輸入輸出的A/D轉換芯片由于接線簡單,傳輸距離遠,在工業測控系統中得到廣泛應用。ADC0832是帶有串行輸入輸出8位逐次逼近式模數轉換器,它的模數轉換過程與數據輸出過程都是在外部時鐘脈沖的控制下進行的,故模數轉換速度比較低,但可以滿足本系統的要求。在該系統中將DI固定接高電平,這樣由DI端輸入的控制字為“111”,這樣AD0832的CH1為單端輸入工作方式,CH0不工作。
同樣,對于D/A轉換也使用具有串行輸入輸出的轉換芯片。TCL5615為美國德州儀器公司的產品,是具有串行接口的數模轉換器,其輸出為電壓型,最大輸出電壓是基準電壓值的2倍。帶有上電復位功能,上電時把DAC寄存器復位至全零。ADC0832和TCL5615的時鐘和數據的傳遞用軟件編程來實現。
4 通信軟件設計
系統通信軟件有主控制器(主機)通信軟件和現場控制器(從機)通信軟件組成。由于現場控制器還要完成信號的監測和控制,所以為了提高工作效率,在主從機發送和接收過程中,都采用中斷控制方式。
4.1主機通信軟件設計
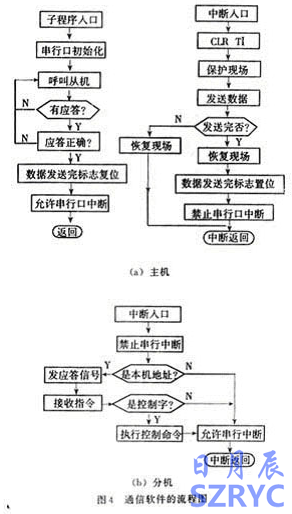
主機的通信功能主要包括呼叫各從機,并向各從機發送控制命令。當主機要發送數據時,先調用相應的子程序,完成發送數據前的初始化、參數預置以及和從機接通聯系的工作,真正的發送數據安排在中斷服務程序中。主程序在調用完后,繼續干自己的工作,以后只需檢查設定的標志位的狀態就可知道數據是否發完。
4.2從機通信軟件設計
從機平時對監控對象進行數據的采集和控制,當有串行中斷時,執行串行中斷服務程序,判別是否為本分機的地址信息,若是本機的地址,轉為接收控制命令,并執行相應的操作:若不是本機地址,則退出中斷。
通信軟件的流程圖如圖4所示。
5 結語
分布式的數據采集系統,由各個從機完成參數測量及控制任務,不但能代替模擬儀表完成常規的過程控制,并且能進行復雜算式運算和順序控制,在現場對輸入、輸出數據進行處理,減少了信息傳輸量,降低了對上級計算機的要求;主機通過數據通道,直接與過程相聯結,完成生產計劃、管理、決策的最優化,從而實現了整個生產過程的最優化自動控制。對該系統進行進一步的完善和擴展,可以應用于多種集散式控制系統,實現多臺分布較遠設備的低成本、高可靠。
責任編輯:Gt

