131 1300 0010
數據采集,又稱數據獲取,是利用一種裝置,從系統外部采集數據并輸入到系統內部的一個接口。數據采集技術廣泛引用在各個領域。比如攝像頭,麥克風,都是數據采集工具。被采集數據是已被轉換為電訊號的各種物理量,如溫度、水位、風速、壓力等,可以是模擬量,也可以是數字量。在互聯網行業快速發展的今天,數據采集已經被廣泛應用于互聯網及分布式領域,數據采集領域已經發生了重要的變化。
而在數據采集中存在著各種噪聲。濾除噪聲的方法有很多種,既有數字濾波器,也有模擬濾波器。這里我們采用了基于單片機和C語言來設計并開發數字濾波系統。
我們針對于單片機數據采集系統中經常出現的隨機干擾,通過手動輸入來模擬數據采集過程,驗證了幾種使用較為普遍的克服隨機干擾的單片機數字濾波算法,并給出了相應的C程序,尤其對中位值濾波和中位值平均濾波算法程序進行了改進。同時也對這幾種濾波算法進行了比較,并指出了每一種算法的具體適用范圍和注意事項。另外我們使用了 proteus進行仿真驗證這幾種濾波方法。另外我們還使用了AD和DA來采集及輸出數據。
1 數字濾波設計原理
這里有很多種數字濾波方法,我們見選用其中幾種來進行設計,如中值濾波、算術平均濾波、加權平均濾波等等。所以下面我將詳細介紹它們。
1.1 中值濾波
中位值濾波是先對某一參數連續采樣N次(一般N取奇數),然后把N次采樣值按從小到大排列,取中間值為本次采樣值。
該濾波方法實際上是一種排序方法,我在此采用的是冒泡法排序。由于在冒泡法排序中,每出現一次前者數據大于后者數據,就要進行二者數據的交換。
該算法的樣例子程序如下:
1 #define N 11 //N值可根據實際情況調整
3 char filter()
5 {
7 char value_buf[];
9 char count,i,j,k,temp;
11 for(count=0;count
13 {
14 value_buf[count]=get_data();
17 delay();
18 }
20 for(i=0;i
22 {
k=i;
24 for(j=i+1;j
26 if(value_buf[j]
28 temp=value_buf[k];
30 value_buf[k]=value_buf[i];
32 value_buf[i]=temp;
34 }
36 return value_buf[(N-1)/2];
37 }
位值濾波能有效地克服偶然因素引起的波動或采樣器不穩定引起的誤碼等脈沖干擾。對溫度、液位等緩慢變化的被測參數采用此算法能收到良好的濾波效果,但對于流量、壓力等快速變化的數據,不宜采用中位值濾波。
1.2 算術平均濾波
算術平均濾波法適用于對一般的具有隨機干擾的信號進行濾波。這種信號的特點是信號本身在某一數值范圍附近上下波動,如測量流量、液位時經常遇到這種情況。算術平均濾波法是要按輸入的N 個采樣數據,尋找這樣一個Y,使得Y 與各個采樣值之間的偏差的平方和最小。
具體實現此算法的子程序如下:
1 #define N 12
2 char filter()
5 {
7 int count;
9 int sum=0;
10 for(count=0;count
13 {
15 sum+=get_ad();
16 delay();
17 }
18 return (char)(sum/N);
19 }
算術平均濾波適用于對一般具有隨機干擾的信號進行濾波。這種信號的特點是有一個平均值,信號在某一數值范圍附近做上下波動,在這種情況下僅取一個采樣值做依據顯然是不準確的。算術平均濾波對信號的平滑程序完全取決于N,當N較大時,平滑度高,但靈敏度低;當N較小時,平滑度低,但靈敏度高,應視具體情況選取N,以便既少占用計算時間,又達到最好的效果。
1.3 加權平均濾波
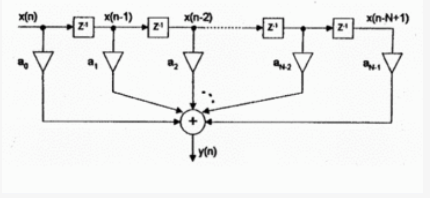
在算術平均濾波和移動平均濾波中,N次采樣值在輸出結果中的權重是均等的,取1/N。用這樣的濾波算法,對于時變信號會引入滯后,N值越大,滯后越嚴重。為了增加新采樣數據在移動平均中的權重,以提高系統對當前采樣值中所受干擾的靈敏度,可采用加權平均濾波,它是移動平均濾波算法的改進。
加權平均濾波是對連續N次采樣值分別乘上不同的加權系統之后再求累加和,加權系統一般先小后大,以突出后面若干采樣的效果,加強系統對參數變化趨勢的辨識。各個加權系統均為小于1的小數,且滿足總和等于1的約束條件。這樣,加權運算之后的累加和即為有效采樣值。
為方便計算,可取各加權系數均為整數,且總和為256,加權運算后的累加和除以256,即舍去低字節后便是有效采樣值。具體的樣例子程序如下:
1 //code數組為加權系統表,存在ROM區。
2 #define N 12
3 char code jq[N]={1,2,3,4,5,6,7,8,9,10,11,12};
4 char code sum_jp=1+2+3+4+5+6+7+8+9+10+11+12;
5 char filter_5()
6 {
7 char count;
8 char value_buf[N];
9 int sum=0;
10 for(count=0;count
11 {
12 value_buf[count]=get_data();
13 delay();
14 }
15 for(count=0;count
16 sum+=value_buf[count]*jq[count];
17 return (char)(sum/sum_jq);
18 }
1.4 中位值平均濾波
它相當于是“中位值濾波法”和“算術平均濾波法”的結合。它連續采樣N個數據,然后去掉一個最大值和一個最小值,最后計算N-2個數據的算術平均值。一般N值的選取:3-14。
具體算法程序如下:
1 #define N 12
2 char filter()
3 {
4 char count,i,j;
5 char value_buf[N];
6 int sum=0;
7 for (count=0;count
8 {
9 value_buf[count] = get_ad();
10 delay();
11 }
12 for (j=0;j
13 {
14 for (i=0;i
15 {
16 if ( value_buf[i]》value_buf[i+1] )
17 {
18 temp = value_buf[i];
19 value_buf[i] = value_buf[i+1];
20 value_buf[i+1] = temp;
21 }
22 }
23 }
24 for(count=1;count
25 sum += value[count];
26 return (char)(sum/(N-2));
27 }
這種濾波方法兼容了移動平均濾波算法和中位值濾波算法的優點,所以無論對緩慢變化的信號,還是對快速變化的信號,都能取得較好的濾波效果。
1.5 限幅濾波
限幅濾波的基本原理是把兩次相鄰時刻(n和n-1)的采樣值Yn和Yn-1相減,求出其差值,以絕對值表示,然后將這個差值與兩次采樣允許的最大偏差值ΔY比較,如果兩次采樣值的差值超過了允許的最大偏差值ΔY,則認為發生了隨機干擾,并認為最后一次采樣值Yn非法,應予剔除。剔除Yn后,可用Yn-1代替Yn;若未超過允許的最大偏差值范圍,則認為本次采樣值有效。可用如下公式表示:
|Yn-Yn-1|≤ΔY;則Yn有效
|Yn-Yn-1|>ΔY;則Yn-1有效
此算法的樣例子程序如下:
此算法的樣例子程序如下:
#define A 10 //A值可根據實際情況調整
char data; //上一次的數據
char filter_1()
{
char datanew; //新數據變量
datanew=get_data(); //獲得新數據
//濾波算法
if ((datanew-data》A)||(data-datanew》A)
return data;
return datanew;
}
該算法主要用于處理變化比較緩慢的數據,如溫度、物體的位置等。使用時關鍵在于最大偏差值的Δy的選擇,通常可根據經驗獲得,也可按照輸出參數可能的最大變化速度Vmax及采樣周期T來決定ΔY的值,即ΔY=VmaxT。
1 #include
2 #include
3 #define uchar unsigned char
4 #define A 0.005
5 #define N 11
6 sbit con1 = P2^3;
7 sbit con2 = P2^4;
8 sbit con3 = P2^5;
9 sbit con = P2^6;
10 sbit OE = P2^0;
11 sbit START = P2^1;
12 sbit EOC = P2^2;
13 uchar a;
14 uchar buf[N] ={0};
15 void change()
16 {
17 int i;
18 for(i=0;i
來源;21ic

