131 1300 0010
煤炭、石油等化石能源是我國(guó)能源供應(yīng)的主體,特別是煤炭在保障我國(guó)能源安全中,起著基礎(chǔ)性作用。在我國(guó)目前的能源結(jié)構(gòu)中,煤炭仍占能源總量中的70%左右。 可見(jiàn)煤炭已成為支撐我國(guó)經(jīng)濟(jì)發(fā)展的中堅(jiān)力量,并且這一現(xiàn)狀在短時(shí)間內(nèi)不會(huì)有太大變化。
在我國(guó)最新制定的煤炭科技十二五發(fā)展規(guī)劃中,提出了“綠色開(kāi)采與生態(tài)礦山”的概念,這就要求提高煤礦生產(chǎn)的安全和采礦區(qū)周邊環(huán)境的保護(hù)。雖然國(guó)家和企業(yè)已經(jīng)為了改善生產(chǎn)條件作了很大努力,但這依舊是一個(gè)沒(méi)有完全解決的問(wèn)題。在我國(guó)煤炭生產(chǎn)中,不安全事故頻頻發(fā)生,對(duì)環(huán)境的破壞和因此導(dǎo)致的死亡事件也屢屢見(jiàn)諸報(bào)端。要解決這一現(xiàn)況,除了提高工人作業(yè)水平以外,必須要加大對(duì)礦井安全設(shè)備的投入。本此設(shè)計(jì)所選定的項(xiàng)目就是立足于實(shí)際,以促進(jìn)煤炭安全生產(chǎn)和環(huán)境保護(hù)為目標(biāo)。可以有效的減少礦井事故的發(fā)生,最大限度保證井下人員的安全和采礦區(qū)周邊環(huán)境的和諧。
結(jié)合我們對(duì)煤炭嚴(yán)峻形勢(shì)的認(rèn)識(shí)和本次大賽的主題,我們將選題方向煤礦安全生產(chǎn)集中監(jiān)控領(lǐng)域。本次設(shè)計(jì)對(duì)構(gòu)建和諧社會(huì)和可持續(xù)性發(fā)展社會(huì)將具有十分重要的意義。
1.2 項(xiàng)目背景/選題動(dòng)機(jī)
煤礦在我國(guó)的國(guó)民生產(chǎn)生活和經(jīng)濟(jì)發(fā)展中起著舉足輕重的作用。現(xiàn)在中國(guó)發(fā)電量的大部分來(lái)自于煤電,煤炭經(jīng)濟(jì)在我國(guó)GDP中占有很大比重,可以說(shuō)煤一朝一夕都在影響著中國(guó)的每一個(gè)家庭的生活。可是我們不能忽視的是,在煤炭產(chǎn)業(yè)促進(jìn)我國(guó)經(jīng)濟(jì)發(fā)展和GDP增長(zhǎng)的同時(shí),在煤炭生產(chǎn)中所產(chǎn)生的安全問(wèn)題和對(duì)環(huán)境的破壞問(wèn)題讓我們不得不去關(guān)注。
2005年3月9日,山西呂梁交城礦難,28人死亡
2006年2月1日晚上7時(shí)許,山西省晉城煤業(yè)集團(tuán)所屬寺河煤礦發(fā)生瓦斯爆炸事故,造成23名礦工死亡,另有53人一氧化碳中毒。
2007年03月06日湖南邵陽(yáng)市邵東縣宏發(fā)煤礦在維修巷道時(shí)發(fā)生瓦斯爆炸,15人死亡。
2008年01月20日,山西臨汾市汾西縣煤礦發(fā)生炸藥爆炸,20人死亡。
2009年01月20日21時(shí)0分, 山西臨汾地區(qū)汾西縣永安鎮(zhèn)蔚家?guī)X村一非法私開(kāi)煤礦窩點(diǎn)發(fā)生瓦斯爆炸,造成20人遇難。
……
當(dāng)然這只是列舉了一部分實(shí)例,這些驚心的實(shí)例時(shí)刻都在提醒我們煤炭安全生產(chǎn)的重要性。造成這一現(xiàn)象除了人為因素外,安全檢測(cè)設(shè)備的落后和不到位也是一個(gè)重要的原因。中國(guó)的許多煤礦企業(yè)在生產(chǎn)中,伴生著嚴(yán)重的資源、環(huán)境、安全等問(wèn)題,如果這一問(wèn)題得不到解決將影響長(zhǎng)遠(yuǎn)發(fā)展,這與可持續(xù)性發(fā)展的理論是背道而馳的。據(jù)調(diào)查,全國(guó)的煤炭企業(yè)除46%的高突礦井外,大部分已進(jìn)入深水平開(kāi)采,滲水、瓦斯、坍塌等已成為越來(lái)越大的安全隱患。增加新的高性能檢測(cè)設(shè)備成為解決煤礦安全問(wèn)題的關(guān)鍵,同時(shí)考慮到很多中小心型煤礦企業(yè)的在安全設(shè)施方面的投入能力,開(kāi)發(fā)出一套經(jīng)濟(jì)實(shí)惠,使用方便,安全高效的安全檢控設(shè)備成為當(dāng)今中國(guó)大多數(shù)煤炭企業(yè)的迫切需求。
采煤工作面作為整個(gè)采煤作業(yè)現(xiàn)場(chǎng)的第一工作區(qū),容易發(fā)生瓦斯爆炸、漏水和冒頂?shù)仁鹿剩坏┌l(fā)生礦難不但會(huì)直接影響到采煤工人的生命安全,更可能會(huì)對(duì)周邊環(huán)境造成嚴(yán)重的破壞。因此,采煤工作區(qū)作為事故地帶,是構(gòu)成整個(gè)煤礦安全體系的最關(guān)鍵一環(huán)。如何保證采煤工作面的安全生產(chǎn),一直是一個(gè)難以解決的嚴(yán)峻課題。
ATMEL公司的32位AVR嵌入式微處理器性能高、功耗低、價(jià)格適宜,特別是芯片內(nèi)部集成了網(wǎng)絡(luò)接口,簡(jiǎn)化了網(wǎng)絡(luò)數(shù)據(jù)傳送和遠(yuǎn)程控制實(shí)現(xiàn)的難度,它強(qiáng)大的數(shù)據(jù)處理能力為數(shù)字信號(hào)的處理提供了有力的支持,除此之外它還具有其它優(yōu)良的性能,成為完成本次設(shè)計(jì)的最佳選擇。本次設(shè)計(jì)擬采用基于AVR 32 AT32UC3A單片機(jī)控制器的EVK1100評(píng)估系統(tǒng)和開(kāi)發(fā)系統(tǒng)為基礎(chǔ)開(kāi)發(fā)平臺(tái),結(jié)合套件本身所提供的資源,通過(guò)擴(kuò)展其它板卡實(shí)現(xiàn)設(shè)計(jì)中要求的全部功能。鑒于AVR以上的優(yōu)點(diǎn),結(jié)合目前的煤礦采煤工作面的安全監(jiān)控存在的不足,設(shè)計(jì)一款基于32位嵌入式AVR微處理器的采煤工作面安全集中監(jiān)控系統(tǒng),提供了一種新型嵌入式的方案,以達(dá)到進(jìn)一步提高采煤工作面的安全性和可靠性。
考慮到作品的實(shí)用性,除實(shí)現(xiàn)對(duì)采煤工作面的監(jiān)控以外,通過(guò)簡(jiǎn)單的修改(設(shè)計(jì)本身支持這種裁剪和功能擴(kuò)成),本次設(shè)計(jì)成果也可以很容易的轉(zhuǎn)換到其它安全監(jiān)控領(lǐng)域,如其它采礦工作的安全監(jiān)控、家居安全的監(jiān)控、工廠生產(chǎn)車(chē)間安全生產(chǎn)和倉(cāng)庫(kù)防盜的監(jiān)控、道路安全運(yùn)營(yíng)的監(jiān)控等等。
山東科技大學(xué)原名山東煤礦學(xué)院,對(duì)煤炭的生產(chǎn)和研究都有很長(zhǎng)的歷史,在幾十年的發(fā)展中積累了豐富的經(jīng)驗(yàn),在煤炭研究領(lǐng)域建立了健全的體系。目前擁有國(guó)家級(jí)煤礦礦山災(zāi)害實(shí)驗(yàn)室,在煤炭安全上從科研到開(kāi)發(fā),我校都走在了全國(guó)煤炭領(lǐng)域的前列。
同時(shí)我們嵌入式實(shí)驗(yàn)2003年成立,積累了很多的有關(guān)嵌入式系統(tǒng)設(shè)計(jì)的經(jīng)驗(yàn),學(xué)校擁有眾多資深學(xué)者和教授,為中國(guó)煤炭事業(yè)和嵌入式的系統(tǒng)設(shè)計(jì),發(fā)展培養(yǎng)了大量的人才。本次設(shè)計(jì)也得到有關(guān)老師的支持和鼓勵(lì),同時(shí)通過(guò)向他們的請(qǐng)教,讓我們團(tuán)隊(duì)成員對(duì)這一系統(tǒng)的設(shè)計(jì)有了更加深刻的認(rèn)識(shí)。相信通過(guò)老師的指導(dǎo)和我們的努力我們一定能夠完成本次設(shè)計(jì)。
二、需求分析
2.1 功能要求
采煤工作面作為采煤工作的第一現(xiàn)場(chǎng),那里的情況瞬時(shí)萬(wàn)變,是整個(gè)井下安全體系中最關(guān)鍵的一環(huán)。本次設(shè)計(jì)將重點(diǎn)關(guān)注如何確保采煤工作面安全生產(chǎn)這一嚴(yán)峻問(wèn)題。
保證生產(chǎn)過(guò)程安全所采取的措施中,除了增強(qiáng)工人自身安全意識(shí)外,另一個(gè)重要的因素就是完善基于各種監(jiān)控設(shè)備的預(yù)警系統(tǒng)和控制系統(tǒng)。在影響采煤工作面安全的各種可檢測(cè)因素中,瓦斯?jié)舛取㈨敯鍓毫Α⑺弧⒎蹓m濃度成為關(guān)鍵,同時(shí)為了便于地面監(jiān)控中心實(shí)時(shí)了解井下的工作場(chǎng)景,實(shí)時(shí)的現(xiàn)場(chǎng)畫(huà)面監(jiān)控也是必不不可少的。
綜上因素,本次設(shè)計(jì)要求能夠及時(shí)的,把采煤工作面頂板壓力、水位、瓦斯?jié)舛取⒎蹓m濃度等物理量數(shù)據(jù)進(jìn)行采集,并通過(guò)嵌入式32位AVR微處理器處理后通過(guò)網(wǎng)絡(luò)及時(shí)上傳到位于地面上的監(jiān)控中心,便于安全監(jiān)察人員和生產(chǎn)調(diào)度部門(mén)觀察和抉擇。在緊急重大的情況下及時(shí)采取相關(guān)措施將危害降到最低。同時(shí),也在現(xiàn)場(chǎng)把瓦斯?jié)舛取㈨敯鍓毫Α⑺弧⒎蹓m濃實(shí)際的檢測(cè)的數(shù)據(jù),進(jìn)行必要的判斷和處理,以實(shí)現(xiàn)在一定的范圍內(nèi)對(duì)以上參數(shù)進(jìn)行自適應(yīng)調(diào)節(jié)和自動(dòng)控制,以達(dá)到提高現(xiàn)場(chǎng)工作效率和安全系數(shù)的目的。
2.2 性能要求
考慮到采煤工作面所在的特殊環(huán)境,要求所設(shè)計(jì)的產(chǎn)品能夠在這種特殊的環(huán)境下正常的運(yùn)行。例如設(shè)計(jì)的低功耗性、防爆性、堅(jiān)固性、和防潮絕緣性以及斷電保護(hù)等,而根據(jù)相關(guān)規(guī)定,凡是要應(yīng)用到煤礦井下的電氣設(shè)備,其防爆性能要求較高,要么是保安型的,要么是本安型的。而要想得到以上資質(zhì),必須到相關(guān)煤礦防爆監(jiān)測(cè)站進(jìn)行有關(guān)的檢測(cè),檢測(cè)通過(guò)后這些設(shè)備才能被用于井下作業(yè)。
針對(duì)本次設(shè)計(jì)大賽,由于受條件的限制,有關(guān)電氣設(shè)備的防爆等無(wú)法實(shí)現(xiàn)和模擬,只能從電氣設(shè)備的基本功能,結(jié)合嵌入式AVR微處理器的性能進(jìn)行系統(tǒng)設(shè)計(jì)。
其它性能要求如下:
實(shí)時(shí)的采集采煤工作面的現(xiàn)場(chǎng)工作畫(huà)面并通過(guò)網(wǎng)絡(luò)向地面監(jiān)控中心傳輸。為了達(dá)到實(shí)時(shí)的目的,采集圖像的速率需最低為5幅/秒 ,同時(shí)為達(dá)到圖像能正常傳輸這一目的,對(duì)采集的圖像需要采取合適的壓縮算法。
頂板壓力、水位、瓦斯?jié)舛取⒎蹓m濃度等物理量數(shù)據(jù)采集的采樣頻率分別是 10秒,50秒,30秒,30秒。同時(shí)為了使采集的數(shù)據(jù)平滑,需要對(duì)采集的數(shù)據(jù)選擇合適的數(shù)字濾波算法進(jìn)行處理。
對(duì)采煤工作面頂板壓力,瓦斯,煤塵,水位等的控制,按照超過(guò)規(guī)定參數(shù)上限80%時(shí),才采取自適應(yīng)調(diào)節(jié)和自動(dòng)控制。通過(guò)自行處理調(diào)整控制,使其始終保持在規(guī)定參數(shù)上限80%以下。當(dāng)超過(guò)這些參數(shù)安全上限時(shí)開(kāi)始報(bào)警并及時(shí)將相關(guān)信息上傳地面監(jiān)控中心。
為更好的實(shí)現(xiàn)對(duì)采煤工作面頂板壓力,瓦斯,煤塵,水位等規(guī)定參數(shù)的自動(dòng)控制,采取PID數(shù)字控制算法。
三、方案設(shè)計(jì)
3.1 系統(tǒng)功能實(shí)現(xiàn)原理
此次設(shè)計(jì)的系統(tǒng)功能示意圖如下圖3.1所示:

本次設(shè)計(jì)是以一個(gè)基于AVR32 AT32UC3A單片機(jī)控制器的EVK1100評(píng)估套件和開(kāi)發(fā)系統(tǒng)為核心,再將各個(gè)功能模塊連接在一起,構(gòu)成的一個(gè)完整系統(tǒng)。
首先由各種傳感器采集信號(hào),包括瓦斯?jié)舛葌鞲衅鳌⒎蹓m濃度傳感器、壓力傳感器、井下水位傳感器和視頻采集模塊等采集到的信號(hào),先進(jìn)行濾波、放大等處理,提取出其中有價(jià)值的信號(hào),然后經(jīng)過(guò)A/D轉(zhuǎn)換以后成為便于處理的數(shù)字信號(hào)。為了提高信號(hào)的有效性和平滑度需對(duì)其進(jìn)行數(shù)字濾波。而圖像信號(hào)經(jīng)過(guò)JPEG壓縮算法處理以后可以通過(guò)網(wǎng)絡(luò),傳遞給用于監(jiān)控的上位機(jī)。同時(shí)為了實(shí)現(xiàn)自動(dòng)控制,對(duì)傳感器傳來(lái)的信號(hào)進(jìn)行PID算法處理。當(dāng)檢測(cè)到參數(shù)超出規(guī)定值以后,產(chǎn)生報(bào)警信號(hào),并將這一信號(hào)傳寄給報(bào)警裝置和地面監(jiān)控中心,同時(shí)發(fā)出控制信號(hào),這一信號(hào)經(jīng)過(guò)D/A轉(zhuǎn)換和放大處理以后對(duì)相關(guān)電機(jī)等進(jìn)行控制,努力使相關(guān)參數(shù)恢復(fù)到正常范圍以?xún)?nèi)。
通過(guò)在系統(tǒng)中增加網(wǎng)絡(luò)模塊,可以實(shí)現(xiàn)數(shù)據(jù)在網(wǎng)絡(luò)中的有效傳輸,同時(shí)實(shí)現(xiàn)讓任何接入到網(wǎng)絡(luò)中的主機(jī)設(shè)備通過(guò)驗(yàn)證機(jī)制以后都可以訪問(wèn)到下位機(jī)傳來(lái)的數(shù)據(jù)。為了統(tǒng)籌管理各個(gè)硬件模塊的工作和充分利用系統(tǒng)的資源,在下位機(jī)中嵌入小型的uC/OS-II操作系統(tǒng),同時(shí)為各個(gè)硬件模塊開(kāi)發(fā)相應(yīng)的驅(qū)動(dòng)程序,以實(shí)現(xiàn)應(yīng)用層軟件對(duì)底層設(shè)備的調(diào)用。
本次設(shè)計(jì)所涉及到的主要技術(shù)包括:①各信號(hào)的周期型采集實(shí)現(xiàn);②模擬信號(hào)的濾波等處理;③數(shù)字濾波算法的實(shí)現(xiàn);④uC/OS-II操作系統(tǒng)的移植;⑤相關(guān)驅(qū)動(dòng)模塊的開(kāi)發(fā);⑥lwip網(wǎng)絡(luò)協(xié)議棧的嵌入;⑦自動(dòng)閉環(huán)控制(PID算法)的實(shí)現(xiàn);⑧JPEG圖像壓縮算法的實(shí)現(xiàn)。
3.2 系統(tǒng)硬件架構(gòu)與資源配置
3.2.1系統(tǒng)硬件組成分析
系統(tǒng)的硬件總體結(jié)構(gòu)框圖如圖3.2所示:

根據(jù)本次大賽的要求,考慮到本次設(shè)計(jì)對(duì)功能的要求以及其使用環(huán)境的特殊性,本次設(shè)計(jì)選用ATMEL公司的AVR 32 AT32UC3A芯片。這款芯片的指令集為緊湊型單周期RISC指令集,并且集成DSP指令集,具有很強(qiáng)的數(shù)據(jù)運(yùn)算處理能力,并兼具高性能、低功耗等特點(diǎn)。完全能夠滿(mǎn)足本次設(shè)計(jì)所要求的性能穩(wěn)定、功耗低等要求。為了充分利用系統(tǒng)的資源和發(fā)掘該款芯片的潛能,實(shí)現(xiàn)多任務(wù)的控制,在其中嵌入了實(shí)時(shí)性強(qiáng)可靠性高的操作系統(tǒng)uC/OS-II 。
在硬件的整體設(shè)計(jì)方面,主要分為四個(gè)部分,以各種傳感器和畫(huà)面采集器為中心的數(shù)據(jù)采集模塊,以濾波整形電路為主的模擬信號(hào)處理模塊,以MCU為中心的數(shù)字信號(hào)(數(shù)據(jù))處理模塊,和以地面上位機(jī)為中心的數(shù)據(jù)顯示存儲(chǔ)和處理模塊。其中數(shù)據(jù)采集模塊根據(jù)信號(hào)的不同處理方式又可以分為兩類(lèi),以各種傳感器為中心的信號(hào)采集模塊和以攝像頭為中心的現(xiàn)場(chǎng)畫(huà)面采集模塊。
給系統(tǒng)上電以后,首先運(yùn)行系統(tǒng)自檢程序,確認(rèn)各個(gè)功能模塊正常以后,系統(tǒng)進(jìn)入正常運(yùn)行模式。通過(guò)定時(shí)裝置和給定的初始參數(shù),系統(tǒng)依次選通各個(gè)信號(hào)采集模塊。各個(gè)傳感器和畫(huà)面采集器將采集到得模擬信號(hào)經(jīng)過(guò)處理以后進(jìn)行A/D轉(zhuǎn)換,然后提交給MCU。MCU根據(jù)預(yù)設(shè)計(jì)的程序處理各種信號(hào),然后將處理好的信號(hào)傳送到地面信息監(jiān)控中心和系統(tǒng)本身自帶的控制模塊。
這里以瓦斯控制為例,采煤工作面的上隅角往往是瓦斯?jié)舛茸罡叩牡胤剑梢酝ㄟ^(guò)在上隅角放置瓦斯?jié)舛葌鞲衅鳎瑢?shí)時(shí)的檢測(cè)那里的瓦斯?jié)舛龋瑥亩WC工作環(huán)境的正常和采煤區(qū)周邊環(huán)境的安全。系統(tǒng)采集到經(jīng)過(guò)模擬信號(hào)處理和A/D轉(zhuǎn)換以后的數(shù)據(jù),經(jīng)過(guò)處理以后,將結(jié)果發(fā)往地面控制中心和系統(tǒng)自帶的控制模塊。系統(tǒng)自帶控制模塊根據(jù)需要適時(shí)自適用的控制通風(fēng)機(jī)的轉(zhuǎn)速,將瓦斯的濃度控制在一個(gè)合理的范圍,同時(shí)系統(tǒng)本身也可以接受地面控制中心發(fā)來(lái)的控制信息,對(duì)通風(fēng)機(jī)的轉(zhuǎn)速進(jìn)行控制,從而實(shí)現(xiàn)系統(tǒng)的監(jiān)和控。
考慮到實(shí)際的需要和處理器本身的處理能力,以及網(wǎng)絡(luò)數(shù)據(jù)的傳輸壓力。這里沒(méi)有采用實(shí)時(shí)視頻傳輸?shù)姆桨福D(zhuǎn)而采用既能滿(mǎn)足對(duì)進(jìn)行狀況的實(shí)時(shí)監(jiān)測(cè)又能充分利用系統(tǒng)資源減小功耗的方案:通過(guò)采集畫(huà)面的方式到達(dá)實(shí)時(shí)監(jiān)控的目的。例如可以在規(guī)定的時(shí)間內(nèi)多次采集采煤工作面現(xiàn)場(chǎng)的畫(huà)面(例如5幀/s),然后將采集到得畫(huà)面進(jìn)行圖像壓縮處理,將處理后的數(shù)據(jù)上傳到位于地面的控制中心,在顯示器上顯示出采煤工作面的畫(huà)面,從而實(shí)現(xiàn)對(duì)井下采煤工作面的監(jiān)控。
通過(guò)將采集處理以后的數(shù)據(jù)實(shí)時(shí)的傳輸?shù)降孛婵刂浦行模鎯?chǔ)到數(shù)據(jù)庫(kù)。科研人員調(diào)用數(shù)據(jù)庫(kù)中的數(shù)據(jù),并對(duì)其進(jìn)行分析,從中總結(jié)規(guī)律,從而找到更好的更安全的作業(yè)方案,進(jìn)而更好的保護(hù)人員的安全和采煤區(qū)環(huán)境的穩(wěn)定。
3.2.2板卡選用說(shuō)明
由于ATMEL公司生產(chǎn)的以AVR(R)32 UC內(nèi)核為基礎(chǔ)的EVK1100平臺(tái),其MCU支持32位精簡(jiǎn)指令集(RISC),擁有512K字節(jié)閃存, 并擁有一個(gè)內(nèi)置的10/100以太網(wǎng)媒體接入控制器(MAC),有一個(gè)SRAM/SDRAM外部總線接口,而它主頻最高可達(dá)66MHz頻率,而且還提供有完整的集成開(kāi)發(fā)環(huán)境(IDE)。可以對(duì)其直接進(jìn)行程序的燒寫(xiě)。此外板上還配備了LED矩陣,顯示模塊和足夠多的外聯(lián)接口等豐富資源。正是由于它具有的這些特點(diǎn),可以很好的滿(mǎn)足本此設(shè)計(jì)的各個(gè)需求。通過(guò)在32位AVR MCU上移植優(yōu)秀的小型uC/OS-II系統(tǒng),使得整個(gè)系統(tǒng)的資源得到更好的使用。
并且通過(guò)板上豐富的外接接口,可以與自制的板卡進(jìn)行連接,進(jìn)而進(jìn)一步擴(kuò)展系統(tǒng)的功能,例如針對(duì)各種被檢信號(hào)的傳感器,現(xiàn)場(chǎng)畫(huà)面采集器、通風(fēng)電機(jī)、井下壓力自動(dòng)報(bào)警裝置、控制攝像頭轉(zhuǎn)動(dòng)等,都可以通過(guò)接口與系統(tǒng)結(jié)合在一起。而且該平臺(tái)自帶以太網(wǎng)接口,可以方便的接入網(wǎng)絡(luò),實(shí)現(xiàn)信息通過(guò)網(wǎng)絡(luò)進(jìn)行的遠(yuǎn)距離傳輸?shù)男枰瑫r(shí)通過(guò)一定的保密機(jī)制,可以通過(guò)任何一臺(tái)接入網(wǎng)絡(luò)的電腦實(shí)時(shí)的訪問(wèn)井下的監(jiān)控系統(tǒng),便于遠(yuǎn)程監(jiān)控的專(zhuān)家的指導(dǎo)。
3.2.3系統(tǒng)器件使用清單
針對(duì)整個(gè)設(shè)計(jì)作品資源的分配,可以參見(jiàn)表3.2中的器件使用清單。
表3.2 器件使用清單
器件名稱(chēng)
用途
數(shù)量
器件名稱(chēng)
用途
數(shù)量
EVK1100板
處理中心
1
攝像頭
截取圖像
1
云臺(tái)
控制攝像頭轉(zhuǎn)動(dòng)
1
電腦
存儲(chǔ)/顯示
1
電機(jī)
模擬通風(fēng)機(jī)
1
報(bào)警器
發(fā)出警告信息
1
瓦斯傳感器
檢測(cè)瓦斯?jié)舛?/p>
若干
水位傳感器
檢測(cè)水位高度
若干
壓力傳感器
檢測(cè)壓力變化
若干
粉塵傳感器
檢測(cè)粉塵濃度
若干
電源
提供電壓
1
網(wǎng)線
傳輸信號(hào)
若干
3.3系統(tǒng)軟件架構(gòu)
系統(tǒng)的軟件總體架構(gòu)如圖3.3所示:
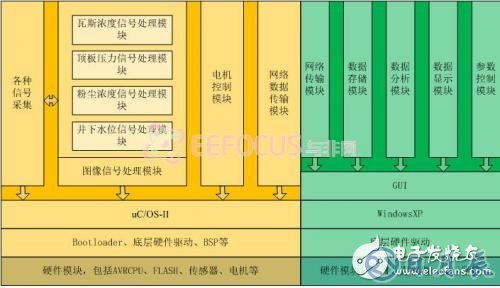
如圖3.3所示,根據(jù)工作平臺(tái)的不同,我們可以將軟件的設(shè)計(jì)從總體上分為兩部分,第一部分主要是在下位機(jī)中嵌入了小型操作系統(tǒng)uC/OS-II的工作平臺(tái),第二部分是運(yùn)行WindowXP操作系統(tǒng)上位機(jī)的工臺(tái)中以在下位機(jī)平臺(tái)上的系統(tǒng)開(kāi)發(fā)為主。
在下位機(jī)工作平臺(tái)上,與3.1中硬件系統(tǒng)總體結(jié)構(gòu)相對(duì)應(yīng)的,我們又可以將軟件系統(tǒng)細(xì)分為四部分。這四部分分別為信號(hào)采集模塊、信號(hào)處理模塊、控制模塊和網(wǎng)絡(luò)數(shù)據(jù)傳輸模塊。在信號(hào)采集模塊主要完成的功能為信號(hào)的選通,即在約定的時(shí)間周期內(nèi)依次處理各個(gè)傳感器或圖像采集器傳遞過(guò)來(lái)的數(shù)據(jù);如3.1中所述,這里的信號(hào)處理模塊也分為兩部分:圖像信號(hào)處理作為單獨(dú)的一部分;瓦斯?jié)舛刃盘?hào)、頂板壓力信號(hào)、粉塵濃度信號(hào)和井下水位信號(hào)的處理方法類(lèi)似,所以把它整體看作一部分;電機(jī)控制模塊主要包括通風(fēng)電機(jī)控制模塊和攝像頭的云臺(tái)控制模塊;在網(wǎng)絡(luò)傳輸模塊主要完成數(shù)據(jù)的上下傳輸,實(shí)現(xiàn)遠(yuǎn)程控制等功能。實(shí)現(xiàn)各個(gè)功能模塊的程序通過(guò)uC/OS-II進(jìn)行統(tǒng)一的調(diào)度。通過(guò)給底層硬件開(kāi)發(fā)驅(qū)動(dòng)程序,對(duì)上層軟件屏蔽器件的差距,方便應(yīng)用層各功能模塊程序的實(shí)現(xiàn),和通過(guò)操作系統(tǒng)提供的接口對(duì)最底層硬件的控制。
在上位機(jī)工作平臺(tái)上,借用上位機(jī)的顯示設(shè)備和海量的存儲(chǔ)空間,可以在基于微軟的操作系統(tǒng)平臺(tái)WindowsXP上開(kāi)發(fā)出許多優(yōu)良的軟件并實(shí)現(xiàn)對(duì)從下位機(jī)傳來(lái)的數(shù)據(jù)的存儲(chǔ)。為了更好便于監(jiān)控中心人員的查看,可以通過(guò)圖形界面程序的設(shè)計(jì)增強(qiáng)人機(jī)的交互性和可觀性。同時(shí)除了數(shù)據(jù)顯示、數(shù)據(jù)存儲(chǔ)和傳遞控制參數(shù)以外,還可以通過(guò)程序設(shè)計(jì),調(diào)用存儲(chǔ)在數(shù)據(jù)庫(kù)中的數(shù)據(jù)對(duì)其進(jìn)行分析,進(jìn)一步挖掘潛藏在數(shù)據(jù)中的信息,從其中總結(jié)規(guī)律,為以后的安全工作產(chǎn)生工作提供重要數(shù)據(jù),進(jìn)一步提高井下工作的安全性和對(duì)周邊生態(tài)環(huán)境的保護(hù)。
在這里給出的僅是系統(tǒng)軟件的整體結(jié)構(gòu)框圖,重要模塊的程序?qū)崿F(xiàn)流程將在3.4中闡述。
3.4 系統(tǒng)軟件流程
根據(jù)3.3的分析,在軟件的設(shè)計(jì)方面,主要分為下位機(jī)和上位機(jī)兩個(gè)部分。嵌入式系統(tǒng)(下位機(jī))與通用型計(jì)算機(jī)系統(tǒng)(上位機(jī))相比具有很多不同點(diǎn),首先嵌入式系統(tǒng)通常是面向特定用戶(hù)群而進(jìn)行設(shè)計(jì)的,通常具有低功耗、體積小、集成度高等特點(diǎn),再次嵌入式系統(tǒng)的硬件和軟件都必須高效率地設(shè)計(jì),同時(shí)嵌入式系統(tǒng)本身一般不具備開(kāi)發(fā)能力。因此嵌入式系統(tǒng)和通用計(jì)算機(jī)系統(tǒng)在軟件設(shè)計(jì)和實(shí)現(xiàn)方面存在許多差異。下面我們將分別闡述在下位機(jī)和上位機(jī)上運(yùn)行的各主要功能模塊的設(shè)計(jì)流程,其中以下位機(jī)的講解為主。
3.4.1 uC/OS-II 系統(tǒng)控制模塊
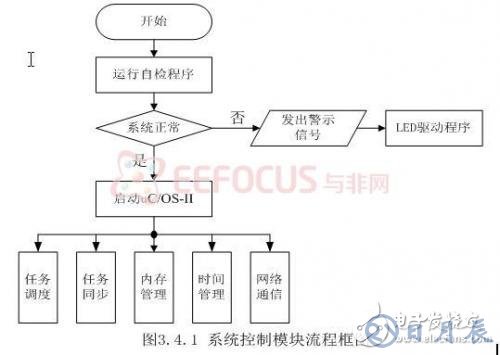
在下位機(jī)上,為了充分利用系統(tǒng)的資源,嵌入了一個(gè)成熟、開(kāi)源的嵌入式操作系統(tǒng)uC/OS-II 。在本次設(shè)計(jì)中,uC/OS-II 的主要功能如圖3.4.1所示:
uC/OS-II是有美國(guó)嵌入式系統(tǒng)專(zhuān)家Jean.J.Labrosse編寫(xiě)的一款源代碼開(kāi)放的實(shí)時(shí)嵌入式系統(tǒng)。與其他嵌入式操作系統(tǒng)系統(tǒng)相比,除具有源代碼開(kāi)放的有點(diǎn)外,他的可移植性強(qiáng)、功能相對(duì)強(qiáng)大,而且其穩(wěn)定性與可靠性很高,因此本次設(shè)計(jì)選用這一款操作系統(tǒng)。
系統(tǒng)上電以后先運(yùn)行自檢程序,如果系統(tǒng)的功能模塊出現(xiàn)異常,則產(chǎn)生報(bào)警信號(hào),為了避免因發(fā)出聲音警報(bào)可能造成的恐慌,本次設(shè)計(jì)通過(guò)EVK1100自帶的LED燈陣列來(lái)提示異常,工作人員可以通過(guò)LED燈陣列顯示的不同信號(hào)快速的查詢(xún)到問(wèn)題的所在點(diǎn),及時(shí)的排除問(wèn)題。
待判斷系統(tǒng)各功能模塊運(yùn)行正常以后啟動(dòng)uC/OS-II。uC/OS-II可以大致分成核心、任務(wù)管理、時(shí)間處理、任務(wù)同步與通信和CPU移植等五個(gè)部分。在本次設(shè)計(jì)中,這五個(gè)部分都將涉及到。如圖3.4.1所示,uC/OS-II正常啟動(dòng)以后,開(kāi)始執(zhí)行任務(wù)調(diào)度、任務(wù)同步、內(nèi)存管理和時(shí)間管理等功能模塊。其中網(wǎng)絡(luò)通信功能在uC/OS-II中并沒(méi)有提供,需要自己移植相關(guān)網(wǎng)絡(luò)協(xié)議棧。在本次設(shè)計(jì)中,我們選擇在uC/OS-II中移植lwip來(lái)實(shí)現(xiàn)TCP/IP協(xié)議棧。
lwip是瑞典計(jì)算機(jī)科學(xué)院的一個(gè)開(kāi)源的TCP/IP協(xié)議棧實(shí)現(xiàn),lwip是一個(gè)輕型的IP協(xié)議,有無(wú)操作系統(tǒng)的支持都可以運(yùn)行,其對(duì)內(nèi)存的需求并不高,差不多幾百字節(jié)的RAM和40K左右的ROM就可以運(yùn)行,這使lwip協(xié)議棧適合在低端的嵌入式系統(tǒng)中使用。因此lwip可以很好的滿(mǎn)足本次設(shè)計(jì)的對(duì)網(wǎng)絡(luò)功能的需求。
3.4.2信號(hào)處理模塊的軟件設(shè)計(jì)流程
根據(jù)信號(hào)的特征和信號(hào)處理的方式,這一模塊的實(shí)現(xiàn)主要可以分為兩大部分:第一部分為對(duì)傳感器傳來(lái)信號(hào)的處理,它們的信號(hào)處理流程相似,我們一瓦斯信號(hào)的處理流程做例進(jìn)行詳解;第二部分為圖像信號(hào)處理模塊,不同于前面所提到的信號(hào)的處理方式,其設(shè)計(jì)到圖像采集和壓縮等問(wèn)題,因此我們將其實(shí)現(xiàn)流程單獨(dú)講解。
3.4.2.1非圖像信號(hào)處理軟件設(shè)計(jì)
(1)PID算法介紹
為了將瓦斯?jié)舛染S持在一個(gè)正常的水平,要求系統(tǒng)能夠接受地面控制中心的控制參數(shù)對(duì)通風(fēng)電機(jī)進(jìn)行控制,同時(shí)為了體現(xiàn)靈活性,要求系統(tǒng)在平時(shí)能夠自我調(diào)控,減少人的工作量。本次設(shè)計(jì)選用PID控制器實(shí)現(xiàn)平時(shí)系統(tǒng)的自我調(diào)節(jié)。系統(tǒng)能夠根據(jù)瓦斯的濃度自動(dòng)調(diào)節(jié)通風(fēng)電機(jī)的轉(zhuǎn)速,同時(shí)又能保證在緊急時(shí)刻將控制權(quán)交給地面控制中心。PID算法控制原理如圖3.4.2.1-1所示:
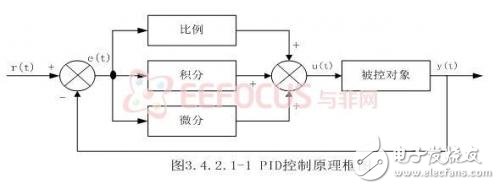
PID是比例、積分、微分的縮寫(xiě),將偏差的比例(P)、積分(I)和微分(D)通過(guò)線性組合構(gòu)成控制量,用這一控制量對(duì)被控對(duì)象進(jìn)行控制,這樣的控制器就稱(chēng)為PID控制器。本次設(shè)計(jì)之所以選擇PID控制器,主要是考慮到PID具有以下優(yōu)點(diǎn):技術(shù)成熟、易被人們熟悉和掌握、不需要建立數(shù)學(xué)模型、控制效果好。
如圖3.4.2.1-1所示,該系統(tǒng)有模擬PID控制器和被控對(duì)象組成。圖中,r(t)是給定值,y(t)是系統(tǒng)的實(shí)際輸出值,給定值與實(shí)際輸出值構(gòu)成控制偏差e(t),有e(t)=r(t)-y(t)。e(t)作為PID控制器的輸入,u(t)作為控制器的輸出和被控對(duì)象的輸入。
模擬PID控制器的控制規(guī)律為:
式3.4.2.1
其中:y(t) ——調(diào)節(jié)器的輸出信號(hào);
e(t) ——調(diào)節(jié)器的偏差信號(hào),它等于給定值與測(cè)量值之差;
KP ——調(diào)節(jié)器的比例系數(shù);
TI ——調(diào)節(jié)器的積分時(shí)間;
TD——調(diào)節(jié)器的微分時(shí)間。
在式3.4.2.1中,比例環(huán)節(jié)的作用是對(duì)偏差瞬間做出快速反應(yīng)。偏差一旦產(chǎn)生,控制器立即產(chǎn)生控制作用,使控制量向減少偏差的方向變化。積分環(huán)節(jié)的作用是把偏差的積累作為輸出。在控制的過(guò)程中,只要有偏差存在,積分環(huán)節(jié)的輸出就會(huì)不斷增大。直到偏差e(t)=0,輸出的u(t)才可能維持在某一常量,是系統(tǒng)在給定值r(t)不變的條件下趨于穩(wěn)態(tài)。微分環(huán)節(jié)的作用是組織偏差的變化。它是根據(jù)偏差的變化趨勢(shì)(變化速度)進(jìn)行控制。偏差變化的越快,微分控制器的輸出就越大,并能在偏差值變化之前進(jìn)行修正。微分作用的引入,將有助于減少超調(diào)量,克服震蕩,使系統(tǒng)趨于穩(wěn)定。
(2)瓦斯控制模塊程序流程
瓦斯控制模塊的流程如如圖3.4.2.1-2所示:
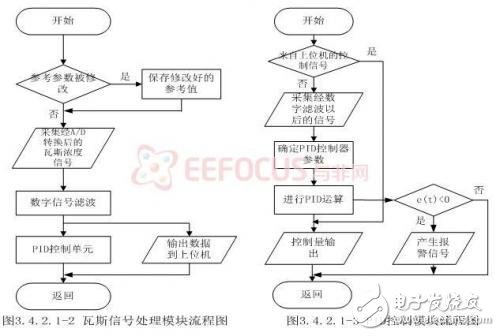
本程序在采樣時(shí)刻到達(dá)以時(shí),才會(huì)打開(kāi)相關(guān)信號(hào)通道,在本模塊中先采集瓦斯?jié)舛刃盘?hào),然后程序運(yùn)行。
為了保證所設(shè)計(jì)產(chǎn)品的實(shí)用性和靈活性,允許其根據(jù)實(shí)際需要,因使用環(huán)境的不同或其它一些因素調(diào)節(jié)相應(yīng)的初始參數(shù)。在程序的每次運(yùn)行的開(kāi)始都要檢測(cè)是否有修改參數(shù)的請(qǐng)求,若有則保存修改后的參數(shù),然后采集經(jīng)A/D轉(zhuǎn)換后的瓦斯?jié)舛刃盘?hào)。通過(guò)數(shù)字信號(hào)濾波以后,將有用的信號(hào)傳寄給PID控制單元,并通過(guò)網(wǎng)絡(luò)模塊上傳到上位機(jī)。
數(shù)字濾波具有高精度、高可靠性、可程控改變特性或復(fù)用、便于集成等優(yōu)點(diǎn)。常用的數(shù)字濾波方法有算數(shù)平均值濾波、中位值濾波、慣性濾波、加權(quán)平均值濾波和限幅濾波。從實(shí)際需要,本次設(shè)計(jì)采用的是算數(shù)平均值濾波。公式如下所示:

算數(shù)平均值濾波可以對(duì)周期脈動(dòng)的采樣值進(jìn)行平滑加工。可以提高本次設(shè)計(jì)所采集數(shù)據(jù)的精確度。
(3)自動(dòng)閉環(huán)過(guò)程控制模塊框圖
自動(dòng)閉環(huán)控制過(guò)程如圖3.4.2.1-4所示

PID算法的基本概念已經(jīng)在(1)中介紹過(guò),如圖3.4.2.1-4整個(gè)過(guò)程為一個(gè)閉環(huán)控制。通過(guò)瓦斯?jié)舛葌鞲衅鳈z測(cè)到的濃度信號(hào),經(jīng)過(guò)模擬信號(hào)處理電路以后過(guò)濾掉干擾信號(hào),然后經(jīng)A/D轉(zhuǎn)換器轉(zhuǎn)換為便于MCU處理的數(shù)字信號(hào)。為了提高測(cè)量的精確度需要對(duì)數(shù)字信號(hào)進(jìn)行濾波處理。經(jīng)過(guò)數(shù)字濾波處理后,進(jìn)入PID控制單元,控制信息經(jīng)過(guò)D/A轉(zhuǎn)換后成為模擬信號(hào),為了對(duì)執(zhí)行機(jī)構(gòu)形成有力的驅(qū)動(dòng)需要對(duì)其進(jìn)行放大,因此添加了功率放大模塊。這里執(zhí)行機(jī)構(gòu)主要指電機(jī)等電氣設(shè)備,通過(guò)對(duì)其控制將被控對(duì)象(瓦斯)等控制在一個(gè)合理的范圍,同時(shí)起到整體減少功耗的目的。
針對(duì)PID控制模塊的程序?qū)崿F(xiàn),如圖3.4.2.1-3所示。在本模塊程序運(yùn)行之前先要檢測(cè)是否有來(lái)自于上位機(jī)的控制信號(hào),若有,在跳過(guò)PID運(yùn)算模塊直接對(duì)被控量進(jìn)行控制,否則,通過(guò)采集到得相關(guān)數(shù)據(jù),自動(dòng)的計(jì)算出用于PID運(yùn)算的相關(guān)參數(shù),然后利用這些參數(shù)進(jìn)行PID運(yùn)算,并產(chǎn)生信號(hào)量對(duì)被控端進(jìn)行控制,努力使環(huán)境變量維持在正常水平。例如瓦斯?jié)舛冗^(guò)高則加大通機(jī)轉(zhuǎn)速,如瓦斯?jié)舛日>S持通風(fēng)機(jī)速率不變,若瓦斯?jié)舛群艿涂梢赃m度的降低通風(fēng)機(jī)的轉(zhuǎn)速以減小功耗。此外通過(guò)檢測(cè)e(t)的大小判斷瓦斯?jié)舛仁欠癯^(guò)正常值,若超過(guò)則產(chǎn)生報(bào)警信號(hào)。
3.4.2.2 圖像信號(hào)處理
為了更快更好的網(wǎng)絡(luò)中的傳輸圖像,需要對(duì)采集到的信號(hào)進(jìn)行壓縮處理,壓縮后的圖像在保持不失真的情況下,可以降低網(wǎng)絡(luò)流量,加快傳輸速度。
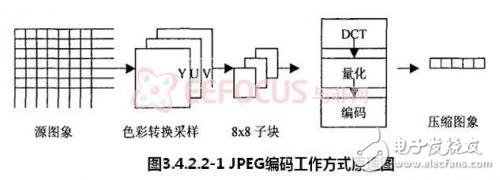
在綜合考慮對(duì)采集到的圖像信號(hào)進(jìn)行處理可以選用的各種算法后,我們最后決定選用JPEG圖像壓縮算法。通過(guò)JPEG圖片壓縮算法能夠?qū)⑺杉降脠D像壓縮成可以滿(mǎn)足需求的數(shù)據(jù)格式,而且考慮到JPEG格式是使用最廣泛的圖片格式,它采用的是特殊的壓縮算法,將不易被人眼察覺(jué)的圖像顏色刪除,從而達(dá)到較大的壓縮比(可達(dá)到2:1甚至40:1),有“身材嬌小,容貌姣好”的美稱(chēng),同時(shí)其算法在本次有限資源的開(kāi)發(fā)平臺(tái)中可以得以實(shí)現(xiàn),因此本次設(shè)計(jì)選用JPEG壓縮算法。
如圖3.4.2.2-1所示,其所表達(dá)的是JPEG編碼的整個(gè)工作方式的原理圖,其流程主要為①色彩空間轉(zhuǎn)換及采樣,②正向離散余弦變化(FDCT), ③量化(QuanTIzaTIon),④直流系數(shù)(dc)的差分編碼、直流系數(shù)(ac)的zig-zag掃描及行程編碼,⑤熵編碼(Entropy Coding)。
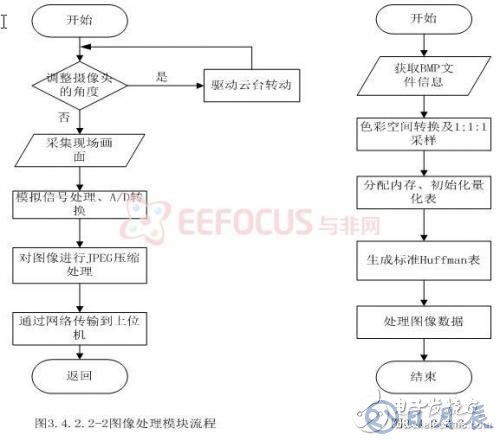
如圖3.4.2.2-2所示,為圖像處理模塊的整體流程圖。定時(shí)周期到達(dá)后,系統(tǒng)每次調(diào)用本程序模塊運(yùn)行時(shí)都要先查看是否有來(lái)自上位機(jī)的控制云臺(tái)轉(zhuǎn)動(dòng)的消息。如有則根據(jù)其參數(shù)將攝像頭轉(zhuǎn)動(dòng)到合適的角度,然后再進(jìn)行現(xiàn)場(chǎng)畫(huà)面的采集。系統(tǒng)每隔一段時(shí)間就采集一次經(jīng)模擬信號(hào)處理單元處理以后再經(jīng)A/D模塊轉(zhuǎn)換后的圖片數(shù)據(jù)。然后將相關(guān)數(shù)據(jù)傳寄到圖片壓縮模塊,實(shí)現(xiàn)對(duì)圖像數(shù)據(jù)的編碼處理。這樣使得圖像的數(shù)據(jù)更小、更容易在信道上傳播、也方便對(duì)圖像的保存和查看。經(jīng)壓縮編碼處理后的圖像數(shù)據(jù)通過(guò)網(wǎng)絡(luò)傳輸模塊送至上位機(jī),上位機(jī)通過(guò)相應(yīng)的JPEG解碼程序就可以實(shí)現(xiàn)對(duì)壓縮圖片的正常顯示,并將相關(guān)數(shù)據(jù)進(jìn)行存儲(chǔ)以備以后查詢(xún)。整個(gè)JPEG圖像壓縮算法的具體實(shí)現(xiàn)流程參見(jiàn)圖3.4.2.2-3。
3.4.3上位機(jī)主要功能模塊的軟件實(shí)現(xiàn)
在上位機(jī)的各功能模塊中,主要的功能模塊就是對(duì)數(shù)據(jù)的分析和顯示。其程序流程框圖如圖3.4.3所示:
程序正常運(yùn)行以后,在平時(shí)的工作模式下(大多數(shù)時(shí)間內(nèi))系統(tǒng)僅是接收來(lái)自下位機(jī)的數(shù)據(jù),然后將數(shù)據(jù)存儲(chǔ)到數(shù)據(jù)庫(kù)中并在屏幕上顯示出來(lái)便于地面監(jiān)控中心工作人員的查看。同時(shí)也可以調(diào)用數(shù)據(jù)庫(kù)中的數(shù)據(jù)進(jìn)行分析,并將結(jié)果在屏幕上顯示出來(lái)。
如果下位機(jī)傳來(lái)的是報(bào)警信號(hào),則系統(tǒng)除了存儲(chǔ)和顯示相關(guān)信息外,還會(huì)啟動(dòng)地面緊急報(bào)警裝置,提醒監(jiān)控中心的人員井下發(fā)生緊急狀況,可以讓相關(guān)人員及時(shí)采取措施,將可能造成的危害降到最小。
當(dāng)程序檢測(cè)到有控制信號(hào)產(chǎn)生以后,立即通過(guò)網(wǎng)絡(luò)給下位機(jī)發(fā)送強(qiáng)制控制信號(hào),指導(dǎo)下位機(jī)完成控制動(dòng)作。實(shí)現(xiàn)遠(yuǎn)程監(jiān)控的作用。
3.5 系統(tǒng)預(yù)計(jì)實(shí)現(xiàn)結(jié)果
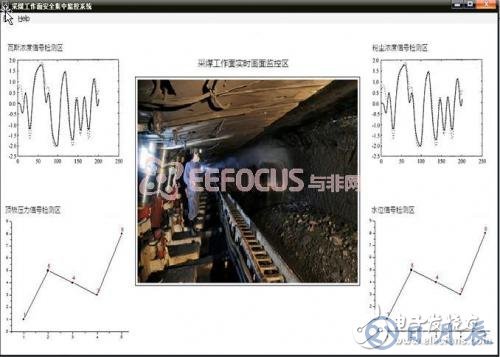
根據(jù)前面得分析,本次設(shè)計(jì)能夠成功的實(shí)現(xiàn)預(yù)定的功能,且滿(mǎn)足相關(guān)的性能要求。最終所完成的作品能夠及時(shí)的對(duì)瓦斯?jié)舛取㈨敯鍓毫Α⒎蹓m濃度、水位和現(xiàn)場(chǎng)畫(huà)面等信息進(jìn)行采集,并且經(jīng)過(guò)相應(yīng)的針對(duì)各種信息的成型模塊處理以后,將結(jié)果實(shí)時(shí)傳輸?shù)轿挥诘孛娴谋O(jiān)控中心。而且根據(jù)某些特殊需求,其它連接在網(wǎng)絡(luò)上的通過(guò)驗(yàn)證的主機(jī)也可以獲得這些信息。當(dāng)檢測(cè)到得信號(hào)出現(xiàn)異常時(shí),例如超出某個(gè)根據(jù)實(shí)際情況預(yù)設(shè)的范圍后,系統(tǒng)本身除自我調(diào)控以外還能夠及時(shí)的發(fā)出報(bào)警信息,提醒井下工作人員立即撤離,并由監(jiān)控中心的工作人員及時(shí)做出部署,盡量將損失盡量降低到最低。
上位機(jī)程序的運(yùn)行預(yù)期界面如下圖所示: