131 1300 0010
1 引言
DSP 既是Digital Signal Pricessing 的縮寫,也是Digital Signal Pricessor 的縮寫。前者是指數字信號處理的理論和方法,后者則是指用于數字信號處理的可編程微處理器。TMS320F240 系列是在TMS320F2000TM 平臺下的一種定點DSP 芯片,是專為數字電機控制和其他控制應用系統而設計的16位定點運算的DSP。它集合了DSP 的高速運算功能與電機的強大控制能力,為控制系統應用提供了一種理想的解決方案。TMS320F240 片內外設有一個16 位的同步串行外圍接口(SPI),一個用于串行通訊接口的SCI 模塊,雙10 位A/D 轉換器,帶中斷的看門狗定時器模塊(WDT),帶有鎖相環(PLL)時鐘發生器。另外,還集成了兩個事件管理模塊EVA 和EVB。因此,TMS320F240 不僅具有高速數據處理能力,還具有控制和事件管理能力,可完成人機界面、與上位機進行串行通信等功能。
2 串行通訊接口(SCI)模塊
SCI 接收器和發送器是雙緩沖的,每一個都有他自己單獨的使能和中斷標志位。兩者可單獨工作,或在全雙工的方式下同時工作。為了確保數據的完整性,SCI 對接收到的數據進行間斷檢測、奇偶性校驗、超時和幀出錯的檢查。通過一個16 位的波特率選擇寄存器,數據傳輸的速度可以被編程為65535多種不同的方式。SCI 的串行通信接口包括SCIRXD(串行通信數據接收)和SCITXD(串行通信數據發送),在不使用SCI 時,這兩個引腳也可作通用I/O 口。發送和接收的操作可以利用狀態標志位通過中斷驅動或查詢算法來完成。與之相關的主要寄存器:發送緩沖寄存器SCITXBUF、接收緩沖寄存器 SCIRCBUF、接收仿真緩沖寄存器SCIRXEMU;通信控制寄存器SCICCR、中斷使能和內部時鐘使能SCICTL1 和SCICTL2 、波特率選擇高字節寄存器SCIHBAUD、波特率選擇低字節寄存器SCILBAUD、優先級控制寄存器SCIPRI、引腳控制功能SCIPC2 以及反映通信狀態SCIXST 等。
串行通信接口模塊有兩個多處理器通信協議:空閑線多處理器模式和地址多處理器模式。空閑線模式在地址前留有一個固定空間,該模式沒有附加的地址 /數據位,它在處理包含多于10 個字節的數據塊方面比地址位模式更有效;地址位模式在每個字節中加入一個額外位(地址位)來區分地址和數據,這種模式在處理多個小數據塊時更有效。
3 RS-485串口通信
RS-232 雖然被廣泛接受,但其數據傳送的速度慢、在現代網絡通信中已暴露出的接口處各信號間容易產生干擾等明顯的缺點。RS-232 只能傳輸15 米,不能滿足遠距離傳輸要求,而RS-485 最大傳輸距離為1200 米,最大傳送速率可達10Mb/s。因此,RS-485 在遠程通信和多機總線系統中具有很大吸引力。MAX48X/49X 系列收發器芯片適合于RS 一422/RS 485 通信標準。其主要有以下特點:
·單+5V 電源供電;
· 低功耗:工作電流120~ 500μA :
· 驅動過載保護;
· 通信傳輸線上可掛32 個收發器方便組成半雙工通信電路;
· 共模輸入電壓范圍:-7V ~ + l2V
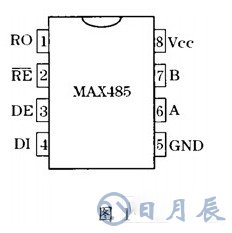
MAX485 為8 腳封裝,引腳配置如圖l 所示,各引腳功能說明如表l 所示。
表1

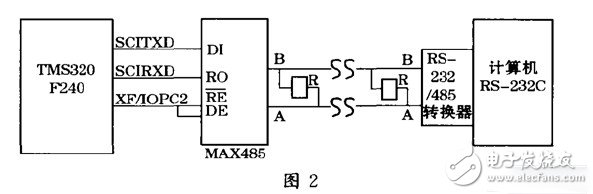
本設計以PC 機為主機,TMS320F240 為從機,主從機之間進行串口通信。TMS320F240 與PC 機之間采用RS 一485 標準進行半雙工通信的接口電路如圖2 所示。其中,接收器和驅動器的選擇由TMS320F240 的XF/IOPC2 引腳控制。由于一般PC 機上提供的是標準的RS 232 C 串行接口,因此,需要RS 232C/RS485 轉換器進行接口轉換。
4 上位機PC機的軟件設計
上位機PC 采用高級語言C,在用C 語言開發DSP 應用程序時,需要嵌入一句或幾句匯編語言,如在程序的初始化階段對INTM、SXM 等位的配置。用asm 的方式就可以實現單句匯編語言的嵌入。
Code Composer Studio 簡稱CCS,是TI 公司推出的為開發TMS320 系列DSP 軟件的集成開發環境(IDE)。CCS 工作在Windows 操作系統下,類似于VC++的集成開發環境,采用圖形接口界面,提供有編輯工具和工程管理工具。在CC 環境下串行通信有兩種方式:即同步方式和異步方式,在此僅討論異步方式中的串行通信。PC 串行口發送器輸出端和接收器輸入端的數據格式為幀信息格式,與TMS320F240的SCI 口格式相同。通信時,雙方必須約定通信數據傳輸格式、傳輸速率及各自工作方式等。本文設計,當上位機請求通訊時,先發請求通訊命令,下位機有效接收并判斷,確認后向上位機發響應碼。上位機在收到響應碼后,再發操作命令。雙方約定:波特率208h;8 位字符,一位停止位,無校驗;傳送方式:PC 機采用查詢方式接收數據,TMS320F240 采用中斷方式接收數據。
5 DSP軟件設計
5.1 串口初始化
首先對寄存器地址、波特率、數據位、停止位、奇偶校驗位進行設置。
void Set()
{
*SCICCR=0x7; //8 位字符,1 停止位,無校驗
*SCICTL1=0X13; //使能發送和接受
*SCICTL2=0x03; //使能接受和發送中斷
*SCIHBAUD=0x02; //波特率=208h,40MHZ
*SCILBAUD=0x08; //208h=40*106/(9600*8)-1
*SCICTL1=0x33; //使能發送和接受,復位
*SCIPRI=0X60; //SCI 中斷(接受和發送中斷)為低優先級中斷
}
5.2 中斷初始化
a)禁止總中斷子程序
void inline disable()
{
asm("setc INTM");
asm("setc SXM");
}
b)使能總中斷子程序
void inline enable()
{
asm("clrc INTM") ;
}
c)中斷服務程序
void interrupt uarttr(){
switch (*PVIR){
//根據中斷向量寄存器PVIR 的值區別是接收還是發送中斷
case 6:UartRec();
//如果PVIR=6,則發生了接受中斷,執行接受中斷服務程序
}
}
d)當由于干擾而引起其它中斷時,中斷進入此程序直接返回主程序
void interrupt nothing(){
return; }
5.3中斷處理
void UartRec(){
unsigned int uwork;
int I, k;
k=0;
while(1) {
do{
uwork=(*SCIRXST);
}while((uwork&0x40= =0));
cReceive=(*SCIRXBUF);
cBuffer[k]= cReceive;
if(cReceive= =’。’) {
cBuffer[k+1]=’’;
nlen=k+1;
Set();
Break;
}
k++; k%=16;
}
}
5.4程序初始化
# include "2407c.h"
//初始化子程序
IniTIal(){
*IFR=0xFFFF; //清除中斷標志
*WDCR=0Xe8; //不使能看門狗
*SCSR1=0x81FE; //CLKIN=6M, CLKOUT=24M
*MCRA=0x3; //use SCITXD, SCIRXD
*PADATDIR=0x100; //設置ADIR 為輸出口
}
5.5主程序
Main(){
Set();
Disable(); //屏蔽所有中斷
IniTIal(); //系統初始化
Enable(); //使能總中斷
While(1) {
unsigned int uwork;
For (inTI=0;I《10;I++){
Do{
Uwork=(*SCICTL2);
}while (uwork&0x0c0!=0x0c0);
(*SCITXBUF)=cAnswer[i];
*IFR=0x0010;
Enable();
}
Do{
Uwork=(*SCICTL2);
}while (uwork&0x0c0!=0x0c0);
(*SCITXBUF)=‘“’;
}
For(;;){
:
}
}
6結束語
本文作者創新點:利用DSP 的串行通信接口(SCI)和功能強大的開發環境CCS,可以方便地實現DSP 與PC 機間的單機或多機串行通信。通過實際運行表明,利用TMS320 的SCI 模塊實現DSP 之間或與PC 機的通信,與傳統的C51 單片機相比,其電路簡單、設置靈活、運行速度快,性能可靠穩定。

